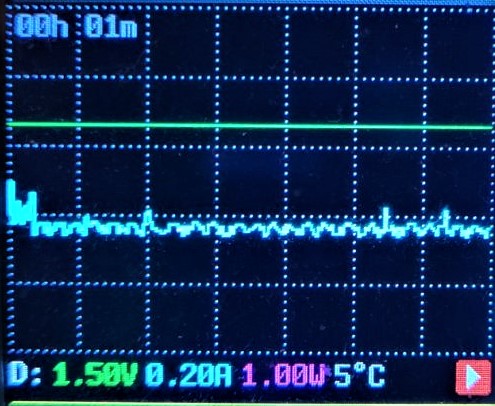
@felix Это пульсации 5V на gpio.
2 лайка
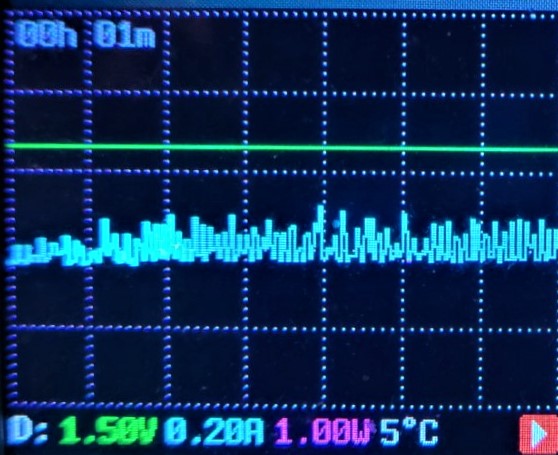
Потребление
Частота Минимум. 1 клетка 0.2A. По горизонтали 10 сек.
Частота Максимум
2 лайка
@igor63r
Игорь, в интерфейсе dimas можно как-то сделать, чтобы название трека выводилось полностью?
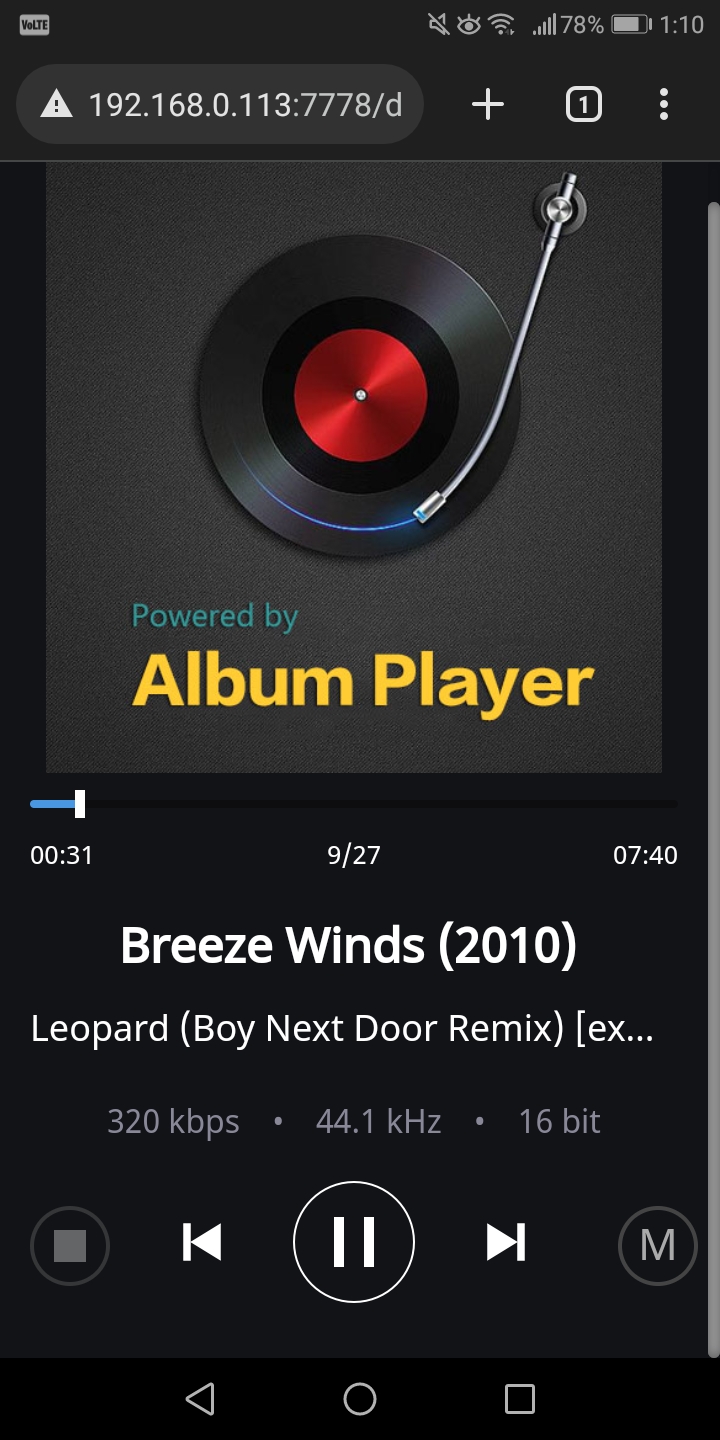
Вот так:
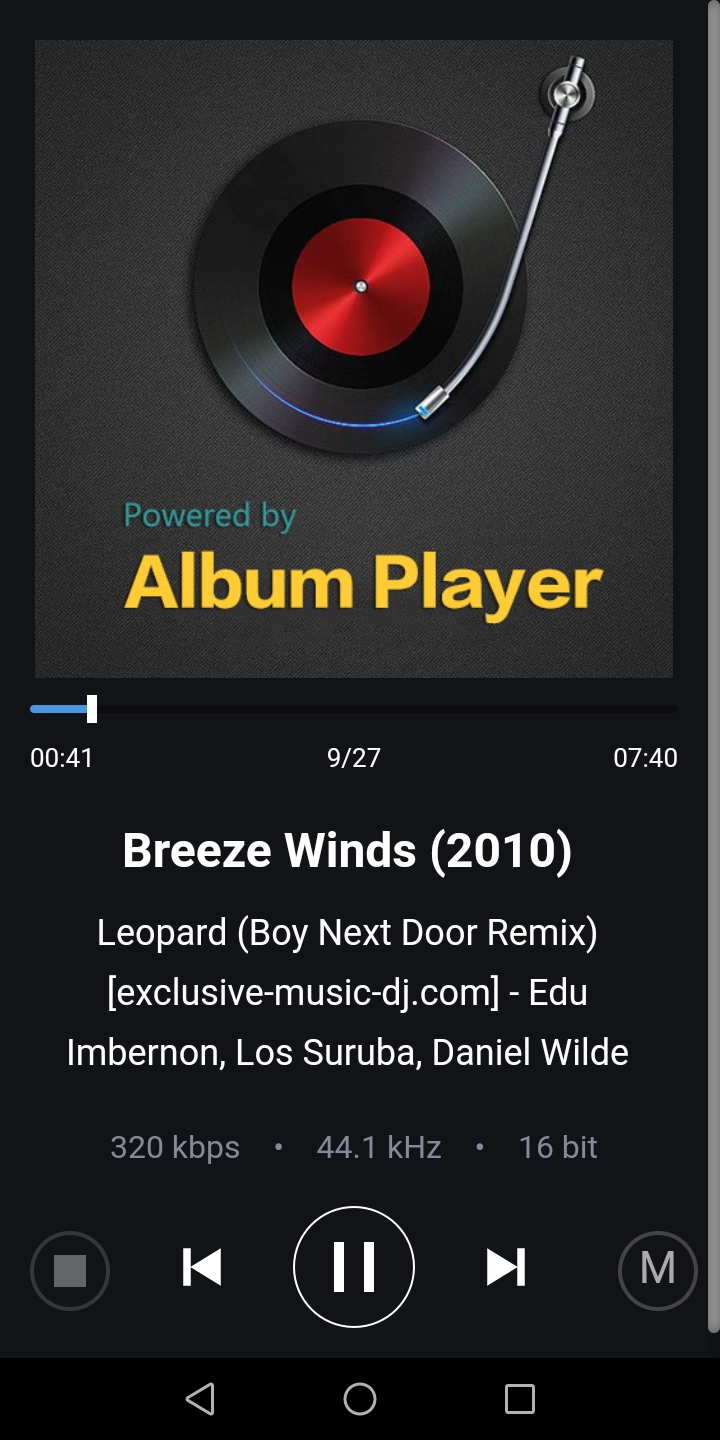
Сергей, видимо, можно, и даже без моего участия, поскольку код интерфейса открытый, а это вопрос компоновки экрана, решаемый средствами HTML и JavaScript. У автора интерфейса, скорее всего, был резон не делать автоперенос строк, чтобы кнопки управления не съезжали ниже края экрана смартфона и не скакали вверх-вниз по экрану при переходах между треками.
И что? Например электроутюг тоже много потребляет. Он тоже сильно шумит?
Не подводите теорию под то, как вам хочется видеть.
Что касается компьютера, так там все значительно сложнее и многограннее. Вот совсем не стоит уравнивать потребление процессора и какой то мифический шум.
Давайте сначала определимся в понятиях. Что вы имеете в виду под шумом? Импульсы по питанию?
В цифровой технике страшен только фазовый шум при работе с большими потоками данных размазанных по времени (ака аудиопоток).
Чем выше частота, тем выше точность позиционирования. Тем меньше ошибок во временной шкале и меньше джиттер. Но если б было все так просто! Компьютер никогда не работает линейно и последовательно. Есть куча задач, на которые процессор постоянно отвлекается. Нужно минимизировать именно эти второстепенные задачи. А повышение частоты будет только во благо для аудио задач.
4 лайка
Павел, может вы подскажите, я в этих малинках ничего не понимаю.
Хочу сделать рендерер, аудио база на рабочем компе будет и с неё по LAN на рендерер, затем на USB цап.
так вот, в моём городе есть возможность купить nanoPi neo4 или же заказать с авиты nanoPi neo3 ? какой вариант лучше будет, а то тут поговаривают, что USB порты по разному звучат.
NEO3
2 лайка
Это маньяки, не слушайте их ![]()
Хотя лучше иметь свой опыт сравнения все же.
Не надо “заводить рака за камень”. Вы прекрасно поняли, что я имею в виду шум широкого спектра, генератором которого являются p-n переходы, работающие в ключевом режиме. Использование подобных “аргументов” Вас, как минимум, не красит. И да, в среднем по больнице инвертор на 2 кВт шумит сильнее, чем телефонная зарядка. Ну и VRM процессора, выдающие Амперы, шумят тоже не плохо.
Я в курсе. У меня хоть и старое, но профильное образование по вычтехнике.
Ну можете называть их так. Хотя слово импульсы намекает на их “штучность”. Я имею в виду бесконечное количество импульсов в общих линиях (типа питания и общего провода), а также ЭМ излучение, которое может наводить ЭДС в других отдельных линиях.
А меня в универе учили, что фазовый шум в цифровых системах увеличивает вероятность ошибки. Но если это купируется правильным тактированием всех элементов схемы, то внутри самой цифровой системы фазовый шум по барабану. В современных исправных компьютерах ошибок как правило не случается.
Это справедливо применительно к линиям передачи типа USB или SPDIF потому, что может влиять на точность работы ЦА-преобразования. Но в этой области я не специалист и углубляться не буду. Хотя частично эта неточность тоже купируется правильным тактирование в приёмнике линии. Для процессов, происходящих “внутри компа” вся эта “точность позиционирования” глубоко фиолетова пока нет ошибок. А их нет.
А вот шум, о котором пишу я, может попадать в ЦАП и воздействовать уже на аналоговую часть и может влиять на точность работы клока передатчика приводя к тому самому фазовому шуму в передающей линии. Что, как Вы заметили, не кошерно.
Поэтому для меня нормальный источник предполагает отдельный тактовый генератор в передатчике с отдельным от всей остальной цифровой схемы питанием.
А что касается частоты CPU, то на мой взгляд она должна быть минимально достаточна для обслуживания всех процессов внутри компа, но никак не влияет на фазовый шум в линии передачи при правильном тактировании этой самой линии.
И давайте завершим тут эту непрофильную дискуссию. Свои точки зрения на этот вопрос мы вроде изложили.
1 лайк
Ок.
Если есть желание “без закидывания помидорами” продолжить диалог - можно в личке.
Я прекрасно понимаю и принимаю ваши доводы. Но у меня есть что сказать. И если вы, как сказали имеете профильное образование, то надеюсь и меня сможете услышать.
2 лайка
Ушами слышно, осциллографом видно. О чём спорить?
1 лайк
Попробуйте Moode, звук слегка притемненный, более плотный на мидбасе.
Скорее всего, ядро сконфигурировано на использование ntfs-3g, которого нет в Yoctoap. Звук можно проверить по сети или с FAT-флешки. pCP ядро используется в родном окружении в PiCoreAP. Там должно всё работать.
Игорь, а можно попросить Вас сделать это и для бигля?
Сергей, а куда бигль тормозить, если он и так на одном ядре еле дышит?
Понял. А у бигля нет той же проблемы с latency ядра, как у Neo3, если не фиксировать частоту процессора? Вы писали об этом на форуме Павла.
Сергей, сильно советую послушать Нео3 с YoctoAP. Множество вопросов пропадет.
Так я слушал, связка Neo3 + Chord Mojo 2 звучит ярковато, бигль мягче.
Андрей, Вы, кстати, на какой частоте остановились?
Я этот вопрос не исследовал, но, скорее, нет, поскольку в штатном варианте latency не завышенная.
1 лайк
Предлагаю потестировать Yoctoap для ASUS Tinker Board 2 с оптимизированным ядром.
Просьба проверить работоспособность во всех отношениях.
https://albumplayer.ru/linux/yoctoap-tb_2.zip
Теперь в /boot монтируется раздел с системным config.txt, где можно подключать оверлеи для шляп.
В /mnt/boot как обычно apconfig.txt.
Добавлены скрипты выбора частоты процессора. По умолчанию при загрузке запускается 816mhz.sh, заменить его можно в предпоследней строке файла /home/root/.profile.
10 лайков